Data Link PC to Autopilot mavlink
Data Link PC to Autopilot mavlink
In this example we will show how to connect and configure the XLRS DL1V2 system to send and receive Mavlink data.
On the one hand we will connect the DL1TXV2 device through the USB or COM5 port to a PC and the Mission Planner software.
Note:
Any software compatible with the Mavlink protocol can be used: QGroundControl, UGCs or similar.
Any autopilot compatible with the Mavlink protocol can be used: Pixhawk, APM or similar.Configuration DL1TXV2
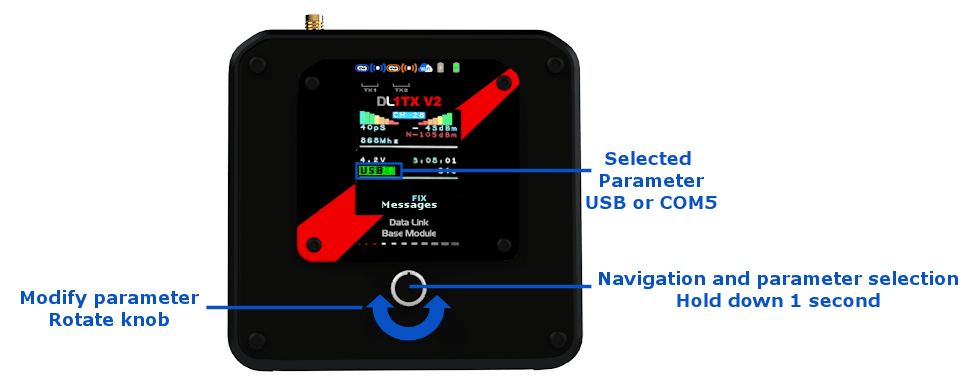
To activate the transparent data link or Mavlink telemetry through the USB port or COM5 is done from the DL1TXV2 transmitter, use the encoder to select and modify the desired parameter (TXDL1V2. CONFIGURATION PARAMETERS FROM ENCODER).
Configuration DL1RX
Connection and Steps
1- Once we have selected on the DL1TXV2 transmitter which USB or COM5 port we want to receive/send the Mavlink telemetry, we will connect it to the PC and open the Mission Planner software, selecting the COM port and 115200 bauds.
3- If everything is well connected as shown in the example diagram and we have a link between DL1TXV2 and DL1RXV2, then we can connect with Mission Planner and start receiving/sending mavlink telemetry data to communicate with the autopilot.