dmdstudio_manual_srv_enc/
Transmisores XLRS
Encoders VL y VR
Encoders VL y VR, funcionamiento y uso
En esta página le enseñaremos el funcionamiento, uso y algunas aplicaciones de ejemplo con las que puede utilizar los encoders VL y VR de los transmisores XLRS (D2, D3 y D4).
Indice:
- ¿Que es un Encoder?
- ¿Como utilizar un Encoder?
- Modos de Funcionamiento (Modo 0 y Modo 1).
- Uso Encoder en Modo 0.
- Uso Encoder en Modo 1.
- Configuración Encoder desde DMDStudio en Modo 0.
- Configuración Encoder desde DMDStudio en Modo 1.
Un encoder es un botón muy parecido a un potenciometro en el que puede seleccionar el valor de forma digital con precisión entre +1000 y -1000.
Dispone de 20 pasos por vuelta y de un pulsador. La ventaja sobre un potenciometro es la precisión y repetitibilidad de los valores que no son posibles en un potenciometro.
Los transmisores XLRS (D2, D3 y D4) disponen de dos encoders configurables VL (Encoder Izquierdo) y VR (Encoder Derecho). ¿Como Utilizarlo?
Si mueve el dial del encoder despacio, puede seleccionar cualquier valor deseado ya que puede ir en pasos de 1 en 1.
Si mueve el dial rápido el sistema incrementará los valores de los pasos para avanzar rápido de tal forma que se puede seleccionar un valor entre 0 y 1000 en una vuelta del encoder.
Lo normal es ir rápido hasta aproximarse al valor y luego bajar la velocidad de selección para aumentar la precisión. Modos de Funcionamiento
Los encoders VL y VR tienen 2 modos de funcionamiento:
- MODO 0: Valor del encoder (+-1000), asignado a un servo u objeto MIX.
- MODO 1: Encoder con 8 posiciones con valores y nombres configurables, asignado a servo u objeto MIX. Con o sin enclavamiento.
Encoder (Modo 0):
Funcionamiento normal, se asigna el encoder directamente a un servo desde la pestaña SRV/SASG y cuando movemos el dial cambiará el valor.
Encoder (Modo 1):
Si usted dispone del receptor RXLRS con firmware V4.12 del 2019 o superior.
Los encoders VL y VR ademas de funcionar como siempre (modo 0), ahora tienen un nuevo modo (modo 1) muy potente e interesante que unifica y simplifica controles complejos como el modo del autopiloto, parámetros del OSD, paleta de colores de la cámara, selección de zooms, etc. por nombrar algunos.
El modo 1 permite que el encoder se asigne a un servo y funcione como un selector de 8 posiciones con 8 valores configurables que pueden quedar memorizados (con enclavamiento) cuando se pulsa el encoder o volver a la posición de reposo cuando se deja de pulsar (sin enclavamiento).
Se puede asignar un nombre al encoder (por ejemplo “Autopiloto”) y a cada una de las 8 posiciones (“MANUAL”, “AUTO”, “RTL”, etc).
Para facilitar la selección y no equivocarse, los nombres y posiciones se ven en el display LCD del transmisor XLRS y tamibén en los mensajes del XOSD.
8 modos de vuelo en un solo encoder:
Ahora podemos disponer de hasta 8 modos de autopiloto en un solo botón, facilitando enormemente el uso y ahorrando mucho tiempo en la configuración y selección de 8 botones ó interruptores para este tipo de ordenes. Los sistemas XLRS con estas versiones se suministraran ya preconfigurados para los modos de vuelo mas habituales de la pixhawk y otras funciones, (Puede ver la configuración por defecto de cada sistema en el manual del Receptor XLRS).
Configuración funciones XOSD en un solo encoder:
Se puede configurar el brillo, volumen, pagina osd, selección de cámara, color
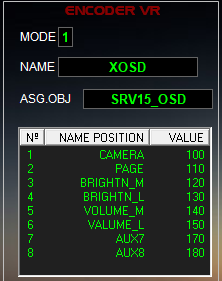
pixels, etc. en un solo encoder.
En la pestaña DS/SRV/ENC puede añadir el valor exacto de cada función del XOSD y su nombre.
Tabla funciones XOSD:
- 100 SELECCIÓN CÁMARA.
- 110 PAG 1,2 ó 3.
- 120 BRILLO +.
- 130 BRILLO -.
- 140 VOLUMEN +.
- 150 VOLUMEN -.
- 190 CANAL VÍDEO +.
- 200 CANAL VÍDEO -.
Con el modo 1 los dos encoders equivalen a 16 botones:
Entre los dos encoders VL y VR, podemos decir que ahorramos 16 botones o que tenemos 16 botones mas en nuestro transmisor XLRS y un manejo mucho mas potente, coherente y sencillo.
Para configurar los encoders VL y VR utilice DMD Studio.
Valor Encoder (+-1000), asignado a un servo u objeto MIX.
El modo 0, envía de forma continua el valor actual del encoder a el servo seleccionado como si de un potenciometro se tratara pero de forma digital por ser un encoder. Ver asignación de servos.

Un encoder se puede asignar a una variable u objeto del mezclador.
El valor de los encoders VL y VR y los pulsadores activados se pueden ver en el display en la pantalla 3.
El pulsador de los encoders VLS (izquierdo) o VRS (derecho) en este modo se comporta como un boton independiente, se puede asignar a un servo, variable, objeto mix, etc. Ver asignacion de botones.
Cómo configurar los encoders en Modo 0.
Valor Encoder con 8 posiciones con valores y nombres configurables.
En el modo 1, el encoder VL o VR solo se puede mover entre 8 posiciones y seleccionar una de ellas pulsando VLS o VRS.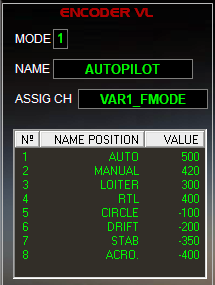
El encoder se puede asignar a un servo “SRVx”, una variable “VARx” o a un objeto del mezclador.
En este modo cuando se mueve un encoder el display cambia a la pantalla 8 (Encoder VL o VR en Modo1) y solo visualiza el nombre del encoder “VL o VR”, el modo seleccionado y el modo actual del botón, cuando se pulsa el botón del encoder el modo seleccionado cambia por el modo actual, si dejamos de mover el encoder a los 10 segundos el display volverá a su modo normal. En el caso del XOSD los modos y nombres se ven en los mensajes.
El pulsador de los encoders VLS (izquierdo) o VRS (derecho) en el modo 1 es el selector ó intro del valor. Cuando el display deja de visualizar los encoders aunque se pulse el botón esta desactivado para que no se seleccione por error ningún valor indeseado o desconocido al pulsar.
El encoder tiene un nombre asociado “Name: AUTOPILOT”.
Cada posición de las 8 seleccionables tiene un nombre “Name Position: 1-AUTO” y un valor asociado “Value: 500”.
Para que el valor quede memorizado al pulsar se debe asignar el encoder a una variable y esta a un servo.
Para que el valor solo sea efectivo en el momento de pulsar y retorne a un valor de reposo se puede asignar el encoder directamente a un servo.