dmdstudio_manual_srv_sasg/
DMDStudio SRV
SASG y SRV
INDICE:
- Asignación de Servos
- Parámetros lista SASG: Funcionamiento.
- Detalle parámetros lista SASG: Configuración y uso.
- Activación servos: Configuración.
- Reasignación Canales Servos: Configuración.

- Asignación servos para copiloto: Configuración.
- Asignación servos en sistemas con BTSDx: Configuración.
- Comandos ACL para servos: Configuración.
- SPPM OUT: Salida serie PPM, configuración V:4.72 ó superior.
- SPPM para versiones antiguas.
Aprender más sobre servos en el sistema XLRS…ASIGNACIÓN SERVOS:
Cada servo se puede asignar a un Joystick, variable e incluso a otro servo ó a nada (=0), esto permite total libertad para realizar cualquier combinación en RC.
Cuando se utiliza una mezcla cuya salida se asigna a un servo el servo no debe tener asignación (=0) para que la mezcla mande sobre el servo.
Sistemas D1: Al final de esta página dispone de la asignación de servos por defecto en receptores RMD1 ó RXLRS enlazados a una BTSDx.
Las salidas físicas de servos en el receptor CH1-CH8 son asignables a cualquier canal lógico (SRV1-SRV16), esto sirve para que se puedan utilizar más salidas de servos de las que tiene físicamente el receptor (7 si se usa SPPM y 8 si no se usa SPPM).
Se pueden utilizar más de 64 servos en total y hasta 23 servos por receptor entre los 7 canales físicos y los 16 canales SPPM, aunque el limite de servos por receptor es 16, se puede asignar el mismo servo a varios canales físicos. Esto ultimo no es habitual, es preferible usar otro receptor o un ampliador de canales.
Opción: Se pueden usar dos receptores redundantes en paralelo en la misma banda o en bandas RF diferentes para mejorar la cobertura y la seguridad.
Nota: Se pueden utilizar 16 servos con el primer receptor + 16 servos con un 2º receptor ó uno o varios ampliadores de canales XLRS con sus objetos propios y sus mezclas independientes, por lo que en la practica se pueden usar más de 64 servos.
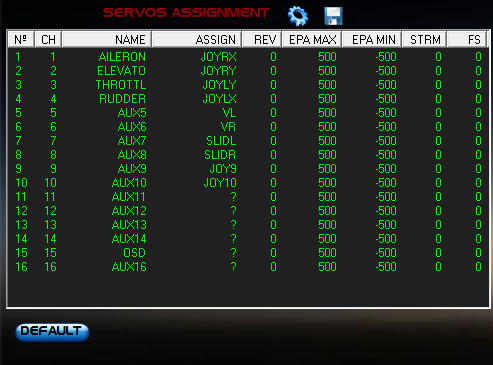
Lista completa de servos se muestra en la imagen.
En este menú se puede invertir el servo añadir un desplazamiento al servo con un SUBTRIM (STRM), establecer la posición del servo cuando el receptor deja de recibir y entra en Fail safe (FS) y limitar la posición máxima y mínima del servo con EPA MAX y EPA MIN. Por defecto EPA MAX y EPA MIN debe estar a +500 y -500 que son las posiciones máximas habituales en un servo ó valores menores adecuando los limites mecánicos de cada servo.
Para modificar parámetros debemos hacer doble click en el apartado que queremos modificar y una vez cambiado, pulsar enter.
Para eliminar parámetros debemos hacer doble click en el apartado que queremos modificar y añadir valor “0”, pulsar enter.
Para tener una visualización mejor y más precisa de un servo en concreto, haga click en el “Nº” de servo deseado y automáticamente accederá a la pantalla SRV.
SRV
En este menú se puede ver solo un servo con su valor en tiempo real y los parámetros desde el punto de vista de un solo servo con ayudas gráficas.
Aprender más sobre servos en el sistema XLRS…DETALLE ASIGNACIÓN SERVOS:
Nº:
Si se hace click en el nº de servo, se accede automáticamente (como un zoom) a la configuración de ese servo específicamente entrando en la pantalla SRV como se muestra en una de las imágenes.
CH:
Asignación canal físico en el receptor.
Los servos en el receptor normalmente se asignan igual (CH1=1, CH2=2….).
Es útil cambiar las salidas de los servos cuando conecta el receptor a un autopiloto a través de la salida de servos serie SPPM donde enviamos 13 canales y queremos utilizar los canales normales de servo en el receptor que no usa el autopiloto para otras cosas como mover una cámara de vídeo, controlar el tren de aterrizaje, etc. Así puede asignar CH1 que normalmente utilizaría con el servo 1 al servo 14 que no usara con el autopiloto.
NAME:
Puede asignar un nombre a cada servo. Es de mucha utilidad saber en todo momento que es y que hace cada servo y verlo en pantalla.
Máximo hasta 7 caracteres.
ASSIGN / ASG:
Asignación del servo a un Joystick, Objeto ó número de objeto (1 a 22), variable (VAR1 a VAR8) ó a otro servo.
Ejemplo básico para alerones: puede asignar el SRV 1 al JOYRX (Joystick derecha X) para un aleron y el SRV 6 al SRV 1 (al servo anterior que ya esta asignado al Joystick) e invertirlo (REV). Tambien puede asignar los dos servos 1 y 6 al mismo Joystick JOYRX y uno de ellos invertirlo si fuera necesario.
Ejemplo para alerones con diferencial: utilice una mezcla (MIX 1) asignando la entrada IN1 al JOYRX y cambiando las ganancias positiva y negativa, dejando la mezcla siempre activa y asignando la salida al SRV 1. Después debe usar una segunda mezcla (MIX 2) asignando la entrada IN1 al JOYRX y cambiando las ganancias positiva y negativa pero al reves de la mezcla anterior, dejando la mezcla siempre activa y asignando la salida al SRV 6.
Nota: En esta pestaña no se pueden asignar directamente (Botones y Switchs) para asignar a cualquier objeto (Servo, variable, etc) debe acceder a la pestaña DS/SRV/BTSASG.
REV / REVERSE:
Para invertir la posición del servo. Normal=0, Reverse=1.
EPA MAX:
Valor máximo del recorrido del servo. Normalmente 500.
EPA MIN:
Valor mínimo del recorrido del servo. Normalmente -500.
La EPA se usa para limitar el movimiento mecánico del servo a una posición limite para no dañar el servo o la mecánica asociada.
Que se limite la posición del servo no quiere decir que el limite del Joystick coincida con el limite del servo, para esto use JOY RATE en la pestaña JOY. Si no se hace correctamente es posible que el movimiento del Joystick no se aproveche al 100% perdiendo movimiento del servo en los extremos del Joystick.
STRM / SUBTRIM
Sirve para desplazar y ajustar fino el centro del servo seleccionado.
Nota: Si se aplica un subtrim a un servo y luego la salida de ese servo se aplica a otro servo ó a una mezcla no es correcto ya que el subtrim de ese servo se aplicaría a la mezcla o al otro servo. Si necesita usar la salida del servo es preferible que haga la mezcla con una variable y luego asigne los dos servos a la salida de la mezcla o variable de esta forma al aplicar el subtrim si seria correcto e individual para cada servo.
FS / FSAFE
Valor del servo en Fail Safe.
Se puede asignar el valor que tendrá cada servo en Fail Safe en esta lista o directamente seleccionando el servo en la pestaña DS/SRV/SRV y modificar el parámetro FSAFE.
Es importante asignar estos valores en caso de fallo de recepción del receptor los servos quedarán en la posición asignada.
Normalmente la mayoría debe quedar a 0, salvo el servo del motor que debería quedar a -500 (ralenti o apagado) y si se usa el servo 5 con un autopiloto dejarlo al valor necesario para ejecutar un RTL ó vuelta a casa.ACTIVACIÓN SERVOS Y SPPM:
PPM
Las salidas de servos CH1-CH8 en los receptores XLRS, se pueden desactivar en grupo o individualmente para utilizar los pins multifuncion.
PPM activación / desactivación en grupo.
![]()
![]()
PPM activa o desactiva todas las salidas de servos CH1 a CHn según la cantidad de servos del dispositivo.
Significa Modulación por Posición de Pulso.
Para activar ó desactivar individualmente cada pin ó servo, se deben usar los comandos ACL a través de la consola.
Comando para activar todos los servos: SRV PPM 255,G
Comando para desactivar todos los servos: SRV PPM 0,G
Comando para activar/desactivar (8 bits en decimal) los servos individualmente: SRV PPM 1,G… SRV PPM 254,G
SPPM
SPPM activación / desactivación.
![]()
![]()
Significa Serial PPM o Suma PPM o CPPM según el fabricante, activa o desactiva la salida serie de servos en el CH predeterminado del dispositivo.
La salida SPPM sirve para enviar los datos de los servos al autopiloto o módulo con entrada SPPM en un solo cable.
Aprender más sobre:
ASIGNACIÓN SERVOS PARA COPILOTO:
En el receptor RXLRS (A partir de la versión: V500b1365) se pueden configurar hasta 16 canales RC (Si se utiliza un segundo RXLRS o un XLRS extensor de canales RC se pueden configurar hasta 32 o mas canales RC) los cuales pueden estar asignados a los objetos (Joysticks, mezclas, sliders, botones, interruptores), se pueden configurar para que los controle el piloto u copiloto / observador.
Cada canal RC tiene un número u objeto asignados como se muestra en la lista a continuación (Los objetos no son necesarios asignarlos a los mismos canales RC), los objetos que empiezan por “O” serán los que controle el segundo transmisor (Copiloto u Observador):
- CH1: 1 ó JOYRX (Joystick Derecho X)
- CH2: 2 ó JOYRY (Joystick Derecho Y)
- CH3: 3 ó JOYLY (Joystick Izquierdo Y)
- CH4: 4 ó JOYLX (Joystick Izquierdo X)
- CH5: 5 ó VL (Encoder Izquierdo)
- CH6: 6 ó VR (Encoder Derecho)
- CH7: 7 ó SLIDL (Slider Izquierdo “”JL”)
- CH8: 8 ó SLIDR (Slider Izquierdo “”JR”)
- CH9: 9 ó JOY9
- CH10: 10 ó JOY10
- CH11: 11 ó JOY11
- CH12: 12 ó JOY12 ó OJOYRX (Joystick Derecho X, Copiloto)
- CH13: 13 ó JOY13 ó OJOYRY (Joystick Derecho Y, Copiloto)
- CH14: 14 ó JOY14 ó OJOYLY (Joystick Izquierdo Y, Copiloto)
- CH15: 15 ó JOY15 ó OJOYLX (Joystick Izquierdo X, Copiloto)
- CH16: 16 ó JOY16 ó OVL (Encoder Izquierdo, Copiloto)
- CH17: 17 ó JOY17 ó OVR (Encoder Derecho, Copiloto)
- CH18: 18 ó JOY18 ó OSLIDL (Slider Izquierdo “JL”, Copiloto)
- CH19: 19 ó JOY19 ó OSLIDR (Slider Izquierdo “JR”, Copiloto)
- CH20: 20 ó JOY20
- CH21: 21 ó JOY21
- CH22: 22 ó JOY22
Configurar los joysticks, encoders u otros objetos para que los controle el copiloto y observador nos servirá de utilizad para ampliar las funciones de nuestro vehículo RC y poder controlar por ejemplo las funciones del gimbal, zoom, tomar foto…
En el receptor los servos se deben asignar a estos nombres por defecto.
La asignación es muy sencilla, en la lista “Servos Assignment” tenemos que localizar en la fila el canal RC que queremos asignar a un objeto y en la columna “ASSIGN” añadir el número u nombre del objeto, puede ver un ejemplo en la imagen de la derecha.
Notas:
- En esta pestaña no se pueden asignar directamente (Botones y Switchs) para asignar a cualquier objeto (Servo, variable, etc) debe acceder a la pestaña DS/SRV/BTSASG.
- Si a configurado algún canal RC a un joystick del copiloto y el recorrido del servo no esta al 100%, revise la configuración del JOYRATE (JOYORATE) de los cuatro joysticks del copiloto deben estar configurados a 500.
ASIGNACIÓN DE SERVOS EN SISTEMAS CON BTSDx:
Los receptores RMD1 y RXLRS enlazados con el transmisor BTSD1 con licencia de radio control, funcionan algo diferente del resto ya que la BTSD1 no tiene joysticks y esta normalmente conectada a un transmisor RC estándar.
Los canales RC del transmisor RC (máximo 10, en preparación hasta 16 ó más) de los joysticks, mezclas y botones son recogidos en formato SPPM (PPM serie) por la BTS1 y convertidos al sistema de objetos XLRS. A Cada canal RC se le asigna un numero u objeto:
- CH1: 1 ó JOYRX (AILE)
- CH2: 2 ó JOYRY (ELEV)
- CH3: 3 ó JOYLY (THROTLE)
- CH4: 4 ó JOYLX (RUDDER)
- CH5: 5 ó VL (FLIGHT MODE, FAIL SAFE)
- CH6: 6 ó VR
- CH7: 7 ó SLIDL
- CH8: 8 ó SLIDR
- CH9: 9 ó JOY9
- CH10: 10 ó JOY10
Ampliaciones futuras:
- CH11: 11 ó JOY11
- CH12: 12 ó JOY12 ó OJOYRX
- CH13: 13 ó JOY13 ó OJOYRY
- CH14: 14 ó JOY14 ó OJOYLY
- CH15: 15 ó JOY15 ó OJOYLX
- CH16: 16 ó JOY16 ó OVL
- CH17: 17 ó JOY17 ó OVR
- CH18: 18 ó JOY18 ó OSLIDL
- CH19: 19 ó JOY19 ó OSLIDR
- CH20: 20 ó JOY20
- CH21: 21 ó JOY21
- CH22: 22 ó JOY22
En el receptor los servos se deben asignar a estos nombres por defecto.
Atención: A diferencia de los sistemas XLRS D2, D3 y D4, con el sistema D1 las mezclas se deben realizar en el transmisor RC estándar y no en el receptor. COMANDOS ACL PARA EL DRIVER DE SERVOS:
Para leer o configurar directamente las propiedades de los servos con la consola DMDStudio, con otra aplicación ó de forma manual, se pueden utilizar los comandos ACL por el puerto serie o USB según el dispositivo.
Los comandos ACL se pueden usar en los ficheros Scripts para la asignación automática o en bloque de múltiples parámetros del sistema.
- SRV LST
- SRV ASG
- SRV NAME
- SRV PPM
- SRV SPPM
- SRV REVERSE
- SRV SUBTRIM
- SRV ENDPOINTMAX
- SRV ENDPOINTMIN
- SRV VMIX
- SRV VALUE
- SRV RDIR
- SRV INIT
Significa Serial PPM o Suma PPM o CPPM según el fabricante, activa o desactiva la salida serie de servos en el CH predeterminado del dispositivo.
La salida SPPM OUT, sirve para enviar los datos de los servos al autopiloto o módulo con entrada SPPM en un solo cable.
SPPM activación / desactivación:
![]()
![]()
Utilice el icono SPPM en DMD Studio. Normalmente debe estar activado si utiliza un autopiloto como pixhawk.
SPPM, configuracion por defecto:
Haga click en el boton SPPM OUT DEF. los valores por defecto seran los de la imagen de muestra. La configuracion por defecto es util para la mayoria de aplicaciones.
Activando la salida SPPM dispondremos de más canales extra. Normalmente la salida SPPM se conecta al autopiloto y el autopiloto suele usar solo los 5 primeros canales. Por lo que se puede usar del canal 6 al 16 en las salidas físicas CH1 a CH8 del receptor reasignandolas.
SBUS. La salida SPPM se puede conectar al autopiloto y a un conversor PPM servos ó a un conversor SBUS.
![]() Salida SPPM OUT configurable: Versiones de Junio-2020 V:4.72 ó superiores.
Salida SPPM OUT configurable: Versiones de Junio-2020 V:4.72 ó superiores.
La salida SPPM OUT es totalmente configurable, esto sirve en caso de necesidad, para utilizar los 16 servos disponibles. Por defecto con los tiempos estándar de servos (1.5mSeg/Neutro).
Para utilizar mas de 13 servos por SPPM se debe comprimir el tiempo de la onda de salida SPPM OUT ya que al poner muchos servos en la señal serie, se supera el tiempo de ciclo de 25mSeg. Esto se consigue con el comando SPPM OUT FAC=2 que comprime todos los tiempos en un facto de 2. es decir si el neutro antes era de 1.5uSeg ahora será de 750uSeg y asi con todos los demas tiempos.
Nota: No siempre los autopilotos o los sistemas que lean el SPPM admitiran esta compresion o tiempos diferentes del estandar.
Aprender más sobre configuración a fondo de SPPM OUT.
Salida SPPM Versiones antiguas V:4.49 a V:4.69:
La salida SPPM (versiones antiguas 4.49 a 4.69), son configurables, esto sirve en caso de necesidad, para utilizar los 16 servos disponibles.
Por defecto con los tiempos estándar de servos (1.5mSeg/Neutro) como máximo se puede utilizar 13 servos.
Para utilizar 16 servos por SPPM se debe seleccionar SPPM CH=16 y bajar el tiempo de sincronismo a 2000useg, FAC cambiarlo de 2 a 1 (750uSeg) y bajar PER a 200uSeg. Algunos conversores funcionaran bien con SYN=4000, FAC=2, PER=200.
SPPM CH: Configura el número de canales. (Mínimo: 4 | Máximo: 16 | Por defecto: 13).
SYN: Tiempo de sincronismo de la trama SPPM en uSeg. (Mínimo: 1000 | Máximo: 4000 | Por defecto: 4000 = 4miliSeg).
FAC: Tiempo pulso servos. (1=750uSeg neutro, +-250uSeg), (2=1500uS neutro, +-500Useg) (Por defecto: 2).
PER: Tiempo separación pulsos en uSeg. (Mínimo: 100 | Máximo: 400 | Por defecto: 400).
SPPM ON/OFF: Activa (ON) o Desactiva (OFF) la salida SPPM.
DEFAULT: Configura los parámetros con la configuración por defecto de fabrica.
Nota: Para SPPM OUT en versiones V:4.72 en adelante (año 2020) ver pagina manual SPPM OUT