AR_XLRS_PIXHAWK
Conexión y Configuración
sistema XLRS con Pixhawk y
Mission Planner
En este ejemplo mostraremos como conectar y configurar el sistema XLRS, el autopiloto pixhawk y el sofware Mission Planner.
- Configuración parámetros (SR1, SR2, SERIAL1 y SERIAL2) en pixhawk Cube.
- Conexionado sistema airborne (RXLRS + XOSD + Pixhawk Cube).
- Verificación y configuración (Solo para usuarios avanzados) velocidad del puerto “Modem” en RXLRS para Mavlink o Data Link transparente (por defecto esta configurado a 38400 baudios y no es necesario modificar).
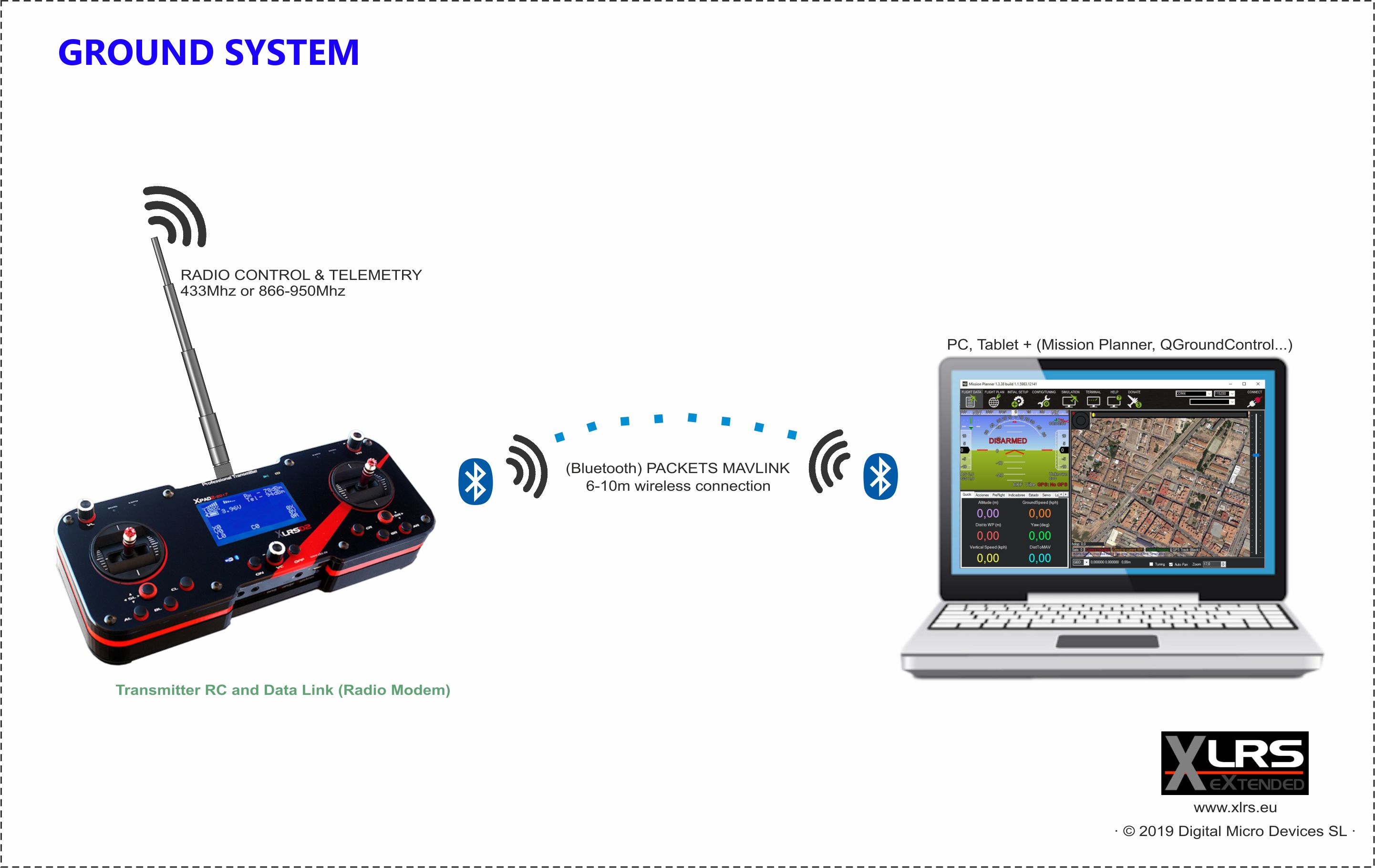
- Conexionado y Comunicación transmisores XLRS con Mission Planner:
Notas:
- Para que se comunique el sistema XLRS con la pixhawk o auopiloto con protocolo Mavlink debe tener la licencia XLRS del protocolo MAVLINK activada en el transmisor XLRS y en el receptor XLRS, si no tiene la licencia activada no podrá establecer la comunicación con el autopiloto.
- Este es un articulo de un ejemplo, no es necesario que el autopiloto sea pixhawk o compatible con el protocolo Mavlink, ya que los sistemas XLRS son data links (Radio modems) transparentes, todos los datos que se reciban y se envían a través del puerto “MODEM” de RX XLRS llegarán al TX XLRS por USB o Bluetooth y viceversa.
FAQs. Preguntas Frecuentes:
- No me funciona la comunicación del sistema XLRS con Mission Planner, ¿Que pasos debo seguir?.
- ¿Donde puedo ver las licencias de mi dispositivo? Desde DMDStudio / Nombre_Dispositivo / GEN.
CONFIGURACIÓN PARÁMETROS AUTOPILOTO (TELEM 1 y TELEM 2)
1- Conecte el puerto USB del Autopiloto a su PC.
2- Abra el software Mission Planner o similar, seleccione el puerto COMx correspondiente y conectese para configurar los parámetros del autopiloto.3- Acceda a las pestaña CONFIG/TUNNING, seleccione Full Parameter Tree.
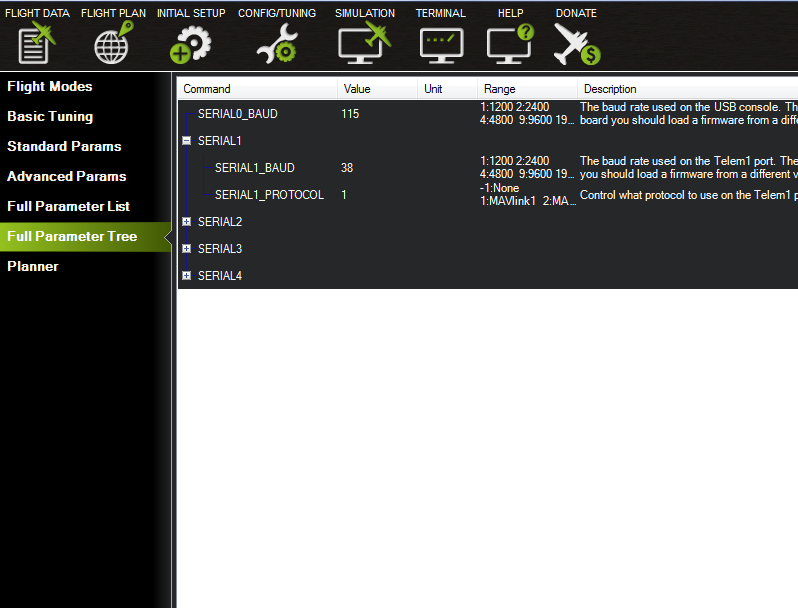
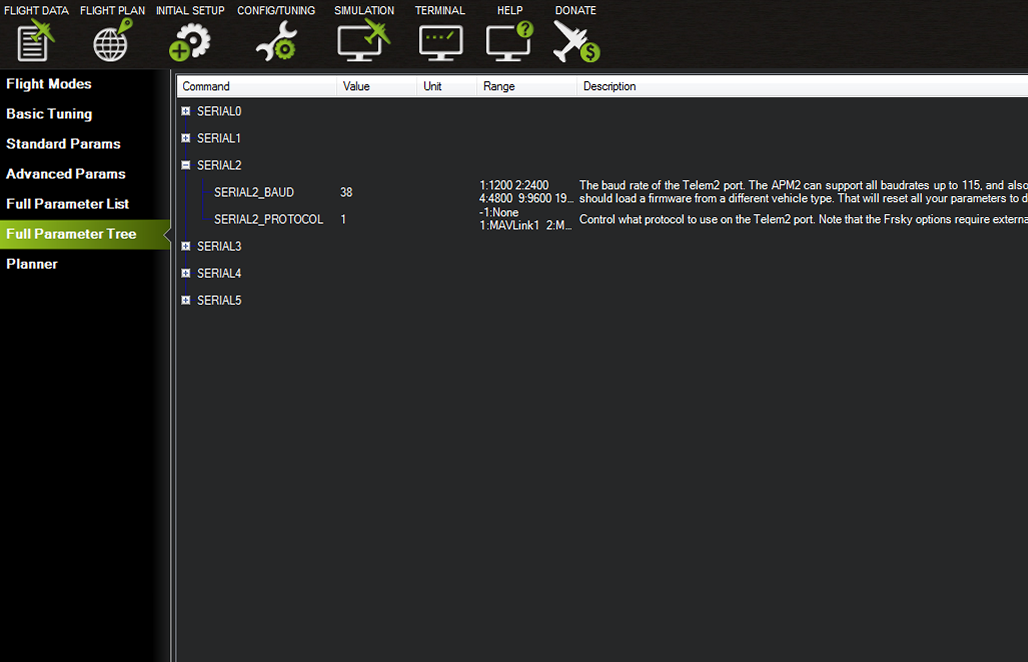
4- Configure los baudios de la telemetria 1 y telemetria 2 a 38400b desde el parámetro “SERIAL1_BAUD = 38 y SERIAL2_BAUD = 38”. (Si tiene los puertos de telemetria configurados a otra velocidad no le funcionará).
5- Configure el protocolo que va a utilizar en la telemetria 1 y 2 desde el parámetro “SERIAL1_PROTOCOL = 1 y SERIAL2_PROTOCOL = 1” por defecto deberían estar configurados a 1 (MAVLINK).
6 de “SR1 y SR2”, (No es necesario configurar cada parámetro exactamente como se muestra en las imágenes, es solo un ejemplo).
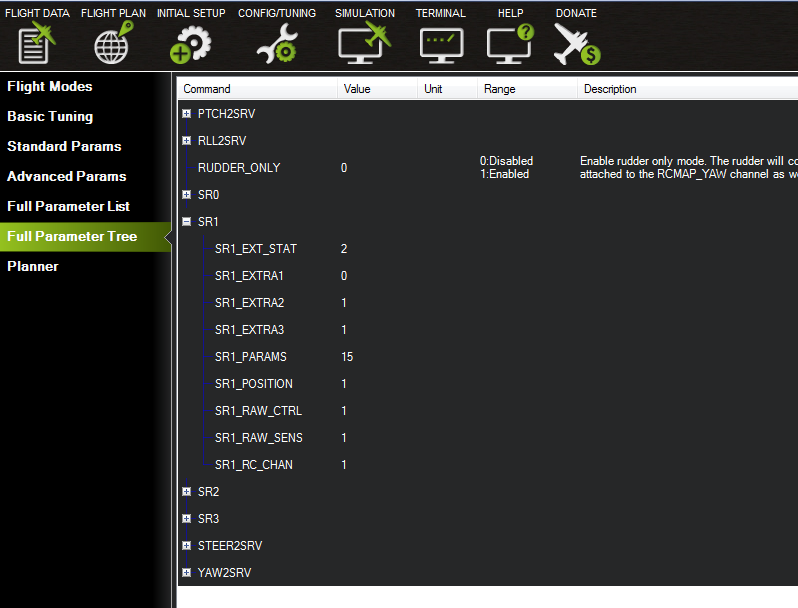
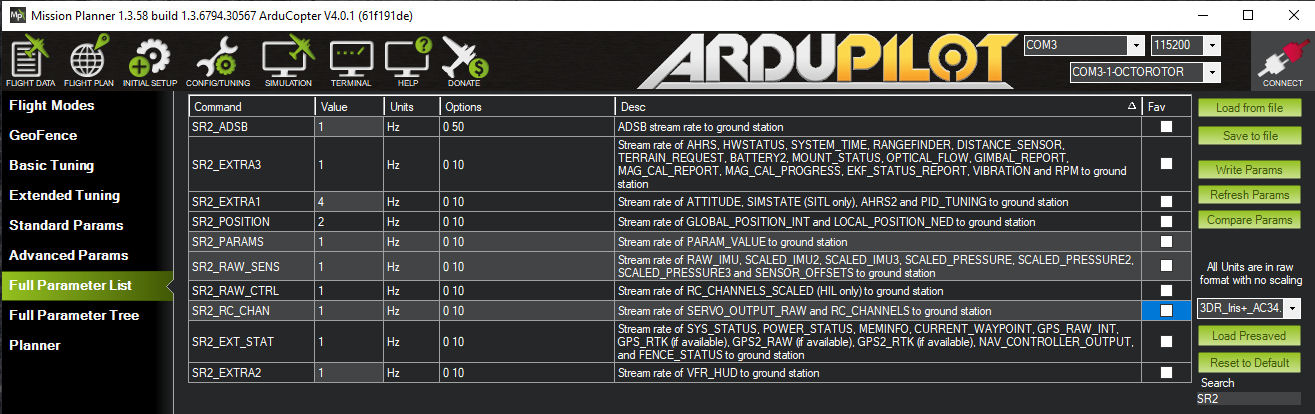
*Recuerde:
Para guardar los parámetros modificados tiene que pulsar en el botón “Write Params”.
El puerto de telemetria 1 y 2 del autopiloto deben estar configurados a 38400 baudios.
7- Una vez los parámetros están guardados, desconecte el USB y realice el conexionado del sistema airborne (RXLRS + XOSD + Pixahwk) como se muestra en la imagen de Conexionado sistema Airborne RXLRS + XOSD + Pixhawk (Haga click sobre la imagen).
8- Importante:
RXLRS-Pixhawk:
TELEM1: Compruebe y verifique que ha realizado correctamente la conexión entre el puerto “MODEM” de RXLRS al puerto “TELEM1” de Pixhawk. Si la conexión no es correcta no podrá realizar la comunicación con Mission Planner.
CH7/SPPM: La salida de servos serie SPPM ó CH7 en los receptores se conecta a la entrada de la pixhawk “RC IN”. Para que funcione debe tener activado el SPPM desde el receptor en DS/RX , por defecto siempre esta activado. (Si no lo tiene activado, active el botón “SPPM = ON”).
SPPM, Atención:
Los valores máximos deben estar limitados a +-999.
En el caso de usar Pixhawk u otro autopiloto lo más correcto sera usar valores +-500 o +-490, si se sobrepasan es muy posible que el autopiloto se bloquee ó sea impredecible en el control de servos, cuando los valores estén al máximo ó al mínimo.
Para que los joysticks tengan el recorrido al 100% acceda desde el RX XLRS en DMDStudio/SRV/JOY, utilice JOY RATE=500 y un DUAL RATE menor.
Luego para limitar estos valores acceda a DMDStudio/SRV/SASG utilice el EPA max y EPA min.
Sistemas D1: En el caso de sistemas D1 con un JoyRate = 1000 (100.0%) es preferible limitar el recorrido de los canales de los Joysticks desde el transmisor RC con EPA, así las mezclas y recorridos dependerán del transmisor RC. Por supuesto la solución anterior también puede utilizarla.
XOSD-Pixhawk:
TELEM2: Compruebe y verifique que ha realizado correctamente la conexión entre el puerto “CH4-MAV” de XOSD al puerto de “TELEM2” de pixhawk. Si la conexión no es correcta no podrá ver los parámetros en el OSD. Si la pixhawk no tiene satélites habrán instrumentos del OSD ocultos, una vez detecte varios satélites los instrumentos aparecerán automáticamente.
RCBUS: Conecte el puerto “RCBUS” de XOSD al puerto “RCBUS” de RXLRS para la comunicación entre los dos dispositivos y también para ver los parámetros de telemetria XLRS (RSSI RX, RSSI Tel, Paquetes RC, RSSI Reposo…) en el OSD.
No se muestran los datos de telemetria XLRS en XOSD:
Activar RCBAPP: Desde el receptor XLRS acceda a DS/RX y compruebe que tiene activado el botón “RCBAPP = ON” para que el receptor envíe los datos a XOSD.
Fail Safe: Si el TX no está enlazado con el recepotor XLRS y esta activado el modo FS (Fail Safe) los datos de telemetria XLRS no se mostraran en XOSD.
OSD: 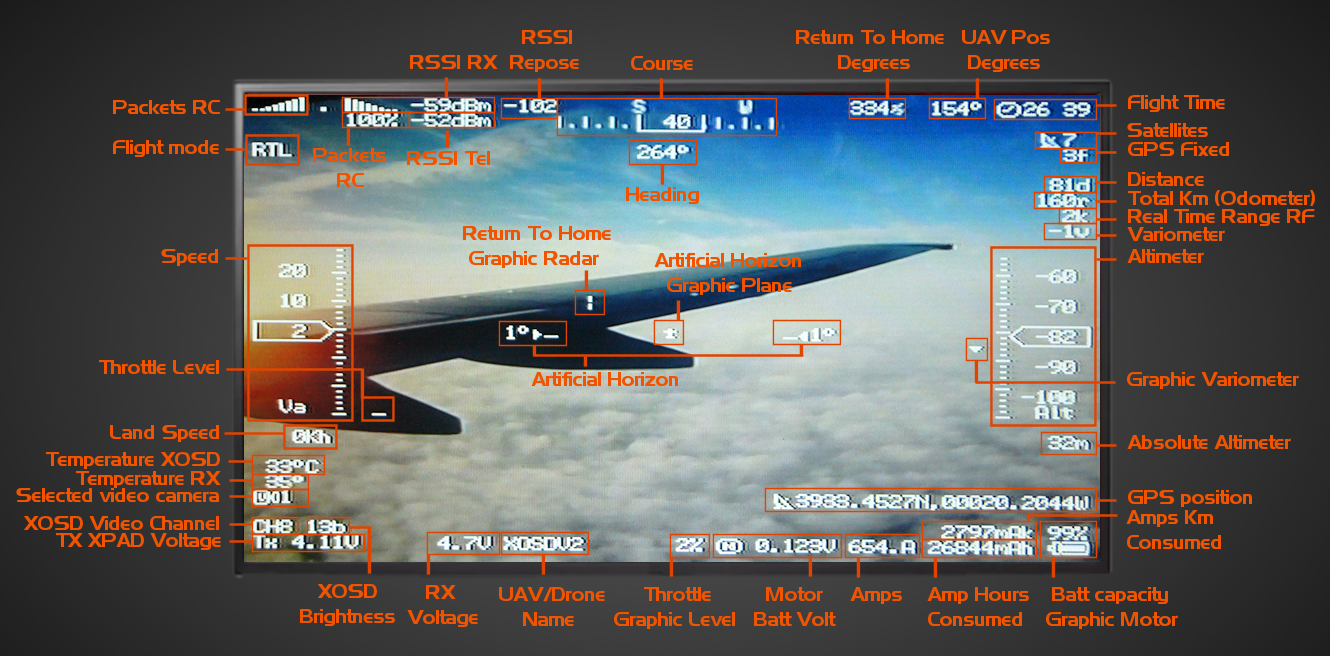
Una vez conectado y activado todo el sistema XLRS, si tiene el receptor de vídeo “RXVID” conectado una pantalla de TV o monitor FPV podrá ver el OSD con los parámetros del autopiloto y del receptor XLRS. (Para ver los datos de RSSI debe tener el transmisor XLRS activado y enlazado con el receptor XLRS).
SISTEMA AIRBORNE (RXLRS(Telem1) + XOSD(Telem2) + AUTOPILOTO)
PUERTO “MODEM” RX XLRS PARA MAVLINK
O DATA LINK TRANSPARENTE
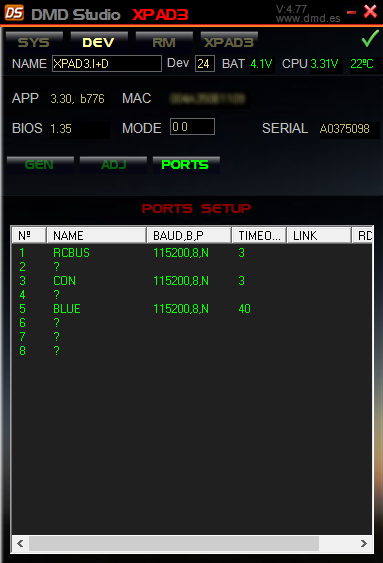
Configurar puerto “MODEM” de RX XLRS desde DMDStudio (DS/DEV/PORTS).
Modificar estos parámetros es para usuarios avanzados, por defecto el puerto “MODEM” de los receptores XLRS están configurados como se muestra en la imagen (Nº: 5 | NAME: MODEM | BAUD,B,P: 38400,8,N | TIMEO..: 5). Si no desea realizar ningún cambio puede revisar si el parámetro esta correctamente configurado en su Receptor XLRS.
En los receptores XLRS se puede cambiar la velocidad y la paridad (por defecto N). Los bits a 8.
La velocidad por defecto es 38400b. (Si se realiza algún cambio en los baudios deberá modificar también la velocidad del puerto de telemetria del autopiloto).
Se debe tener en cuenta que aunque se suba la velocidad esta limitada por la velocidad del enlace de radio que puede ser 50000 o 100000b. Si se sube y no se usa control de flujo de hardware (RTS, CTS) puede desbordar el buffer y perder datos.
Control de flujo hardware:
Usar la consola (DS/SYS/CONS) con el comando MODEMCTRL = 0,G para desactivar y MODEMCTRL=1,G para activar. Para leer estado usar sólo MODEMCTRL sin parámetros.
Cuando el control de flujo hardware esta activo CTS=CH6 y RTS=CH5 (puede ignorarse este ultimo).
Importante: Estas opciones son para usuarios avanzados que necesitan otras configuraciones del puerto MODEM. Si usted no lo necesita debe asegurarse de dejar la opción como esta en el ejemplo: 38400,8,N.
TRANSMISOR XLRS TELEMETRIA A TRAVÉS DE USB CON MISSION PLANNER
1- Conecte el USB al transmisor XLRS y al PC.

2- Verifique el puerto COMx del transmisor (Puede verlo desde el Panel de control\Hardware y sonido\Dispositivos e impresoras)
3- Para establecer la conexión con Mission Planner, primero debe activar la telemetria desde el transmisor XLRS utilizando los botones calientes.
Activar / Desactivar MAVLINK (USB) en transmisor XLRS:
Mantener pulsado botón (SL) SHIFT + Botón central (ON) para activar.
Mantener pulsado botón (SL) SHIFT + Botón central (OFF) para desactivar.
Para verificar si se a activado el la telemetria Mavlink a través de USB, en algunas pantallas del transmisor XLRS (XPADx), se sustituirá el nombre “TEL” y aparecerá “MAV o Mvu” y en la pantalla principal aparecerá “USB->MAV o Mvu” (Dependiendo de la versión de firmware del transmisor XLRS).
Si tiene desactivado la telemetria MAVLINK desde el transmisor XLRS, el USB funcionará con los comandos ACL y tendrá acceso a la configuración desde sofware DMDStudio. (Si tiene la Telemetria activada a través de USB, no tendrá acceso a DMDStudio).
Nota: Para mas adelante, si quiere activar la telemetria por USB fija “Mvu” aceda al siguiente enlace: PUERTO USB O BLUETOOTH FIJO PARA MAVLINK / DATA LINK.

5- Conecte con el puerto COMx correspondiente y a 115200b.

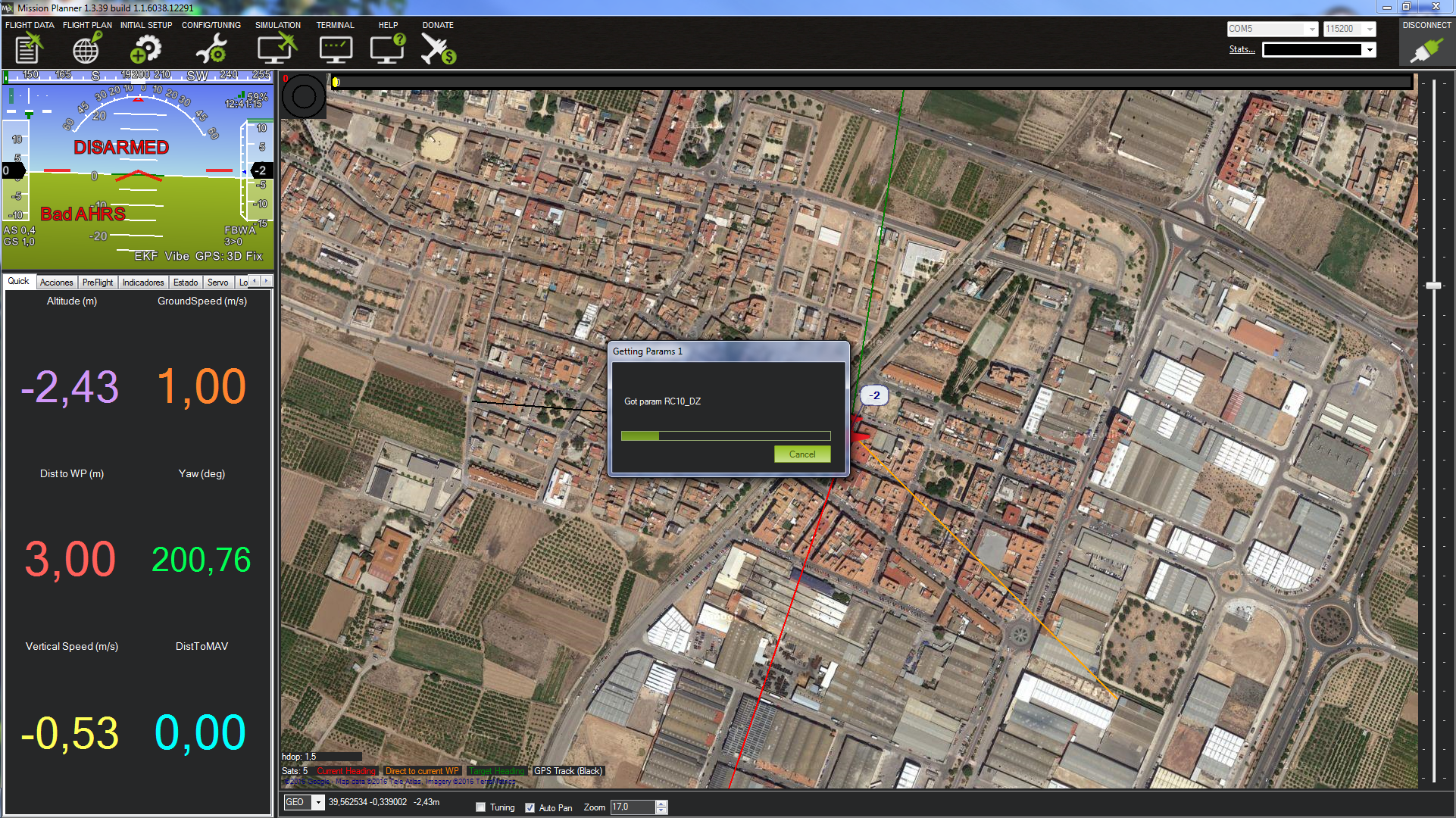
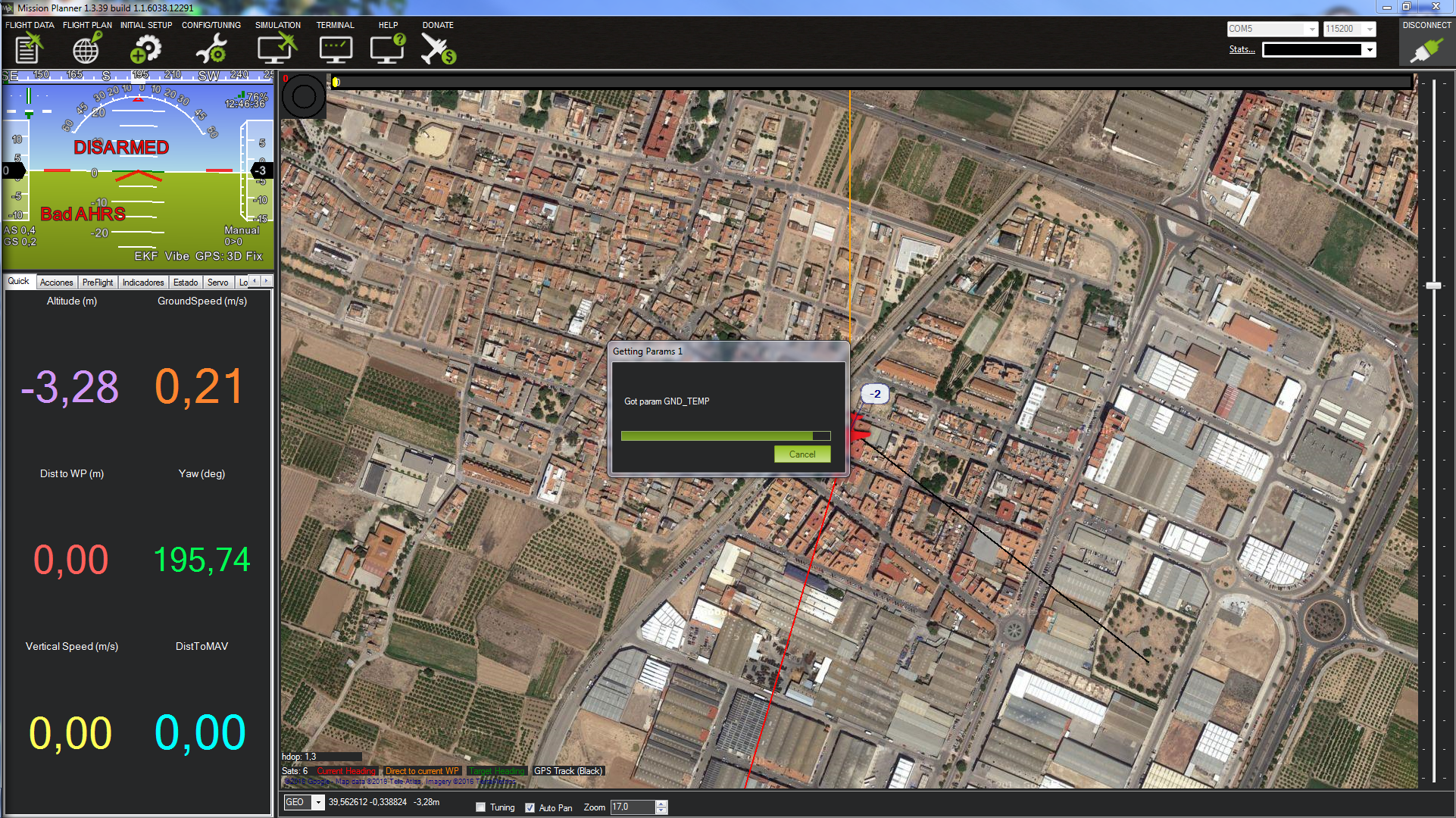
6- En Mission Planner, haga click en el botón “CONNECT” y en pocos segundos empezará a enviar todos los parámetros, espere hasta que termine.
Notas:
La modulación RF para el transmisor y receptor XLRS es recomendable que este a 100Kb. (Por defecto ya esta activado desde fabrica). Puede revisar esta configuración en cada dispositivo en el DMDStudio en la pestaña DS/ RM / CONFIG.
Si sólo va a hacer pruebas ó no va a cambiar ningún parámetro posteriormente y solo desea volar con telemetria, puede cancelar la carga inicial. Para misiones largas es conveniente que se carguen los parámetros.
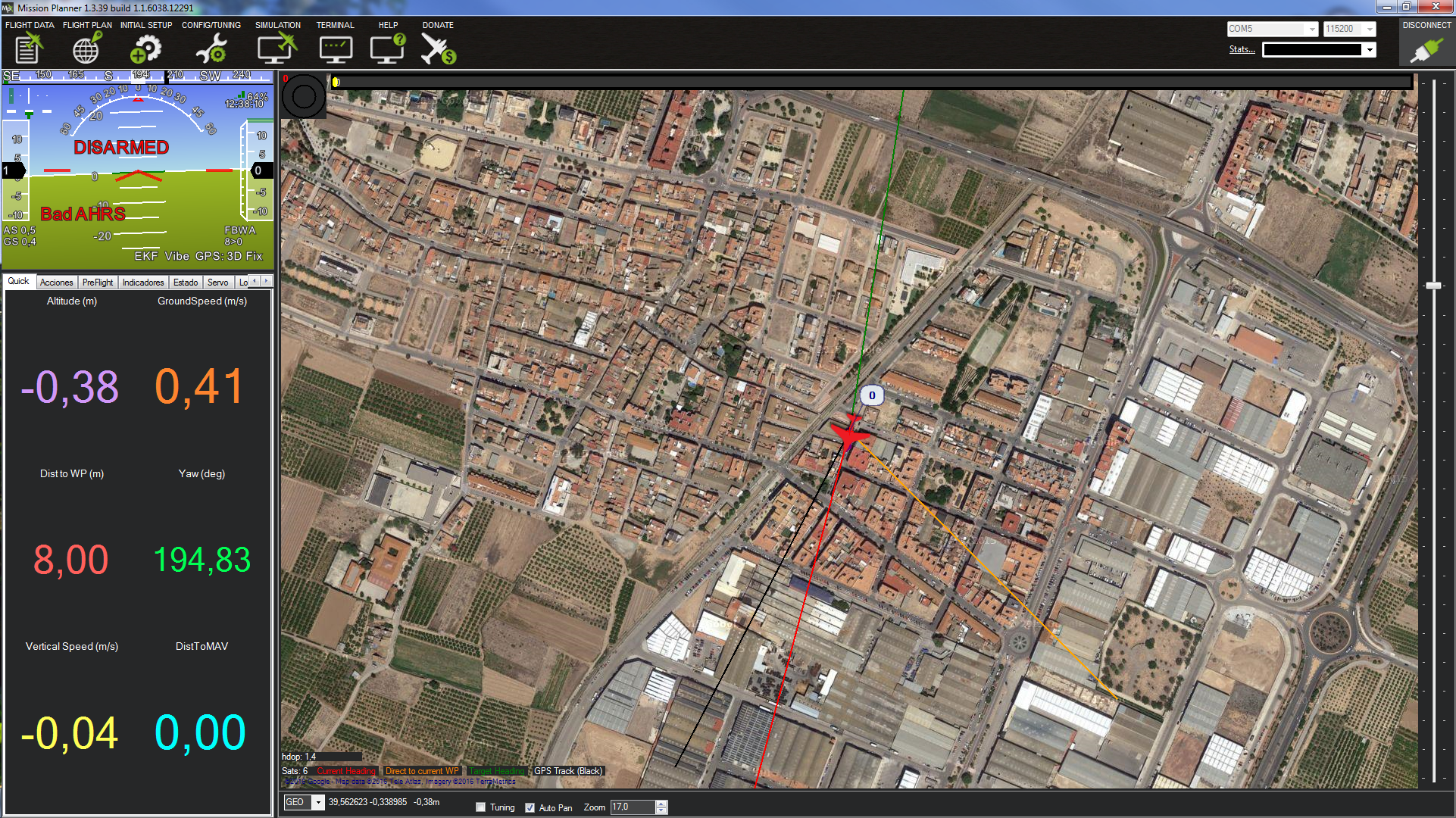
7- Una vez terminado este proceso tendrá el sistema XLRS enlazado con la telemetria Mavlink de la Pixhawk.
Recuerde: Debe tener el receptor XLRS y el autopiloto Pixhawk encendidos.
TRANSMISOR XLRS TELEMETRIA A TRAVÉS DE BLUETOOTH CON MISSION PLANNER
Nota: Los transmisores XLRS fabricados en 2018-2020, el modulo bluetooth esta configurado por defecto a 115200 baudios, los pasos 1 y 2 son solo para verificar que la configuración es correcta, si no esta seguro no modifique ningún parámetro y envíe un email a support@dmd.es.
1- Verificar velocidad puerto bluetooth en TX XLRS:
Dependiendo de la versión (Hardware) del TX XLRS es posible que el modulo bluetooth este trabajando a 9600 o 115200 baudios.
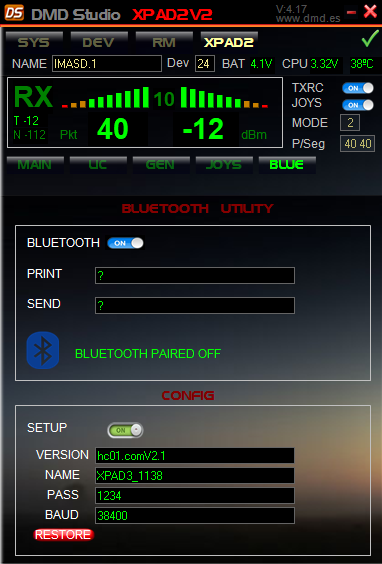
Para saber a que velocidad esta trabajando el modulo bluetooth de su TX XLRS conecte el TX XLRS a DMDStudio/DEV/PORTS y verificaremos la linea 5 (Nº: 5 | NAME: BLUE | BAUD,B,P: 9600,8,N ó 115200,8,N | TIMEOUT: 3 ó 40).
2- Verificar que el bluetooth de TX XLRS esta activado:
Puede realizar la comprobación directamente desde el TX XLRS el led del icono Bluetooth debería estar encendido y si no es así entonces acceda a DMDStudio/XPAD/BLUE y active el bluetooth.
Nota: En los transmisores XLRS (2018-2020), no podrá cambiar los parámetros del setup del modulo bluetooth, son fijos, el nombre del bluetooth es “XLRS” y contraseña: “1 2 3 4”.
3- Enlazar Bluetooth TX XLRS con Bluetooth de PC o Tablet:
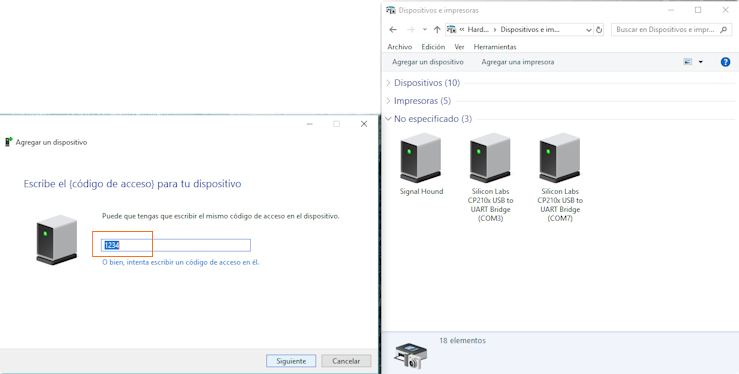
- Desde Windows, accedemos al panel de control (Panel de control\Hardware y sonido\Dispositivos e impresoras) y desde una tablet o movil accedemos ajustes bluetooth.
- Seleccionamos “Agregar un dispositivo”.
- Pulsamos en el dispositivo “Desconocido”.
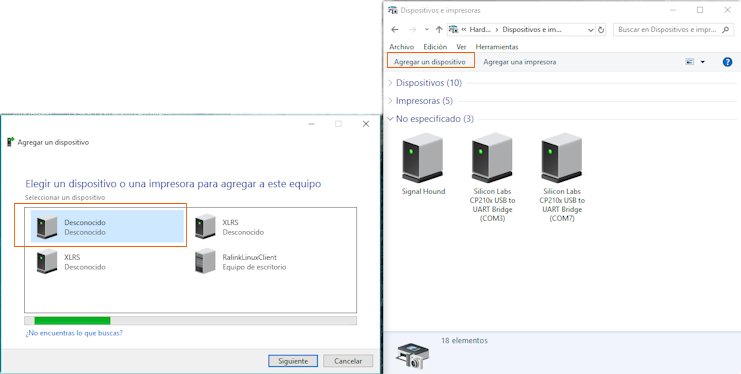
- Añadimos el código de acceso (Por defecto: 1234).
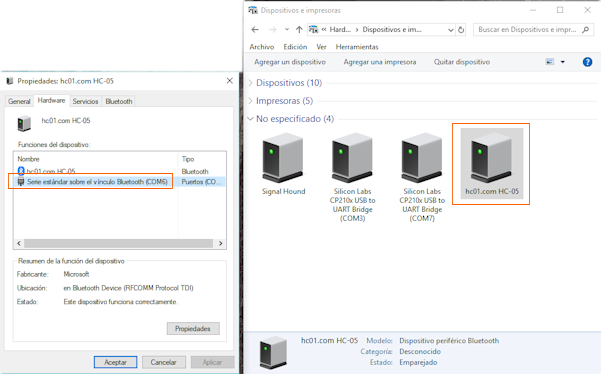
- Ahora veremos el nuevo dispositivo vinculado con nuestro PC o tablet, para ver el puerto COMx desde Windows seleccionamos el dispositivo para acceder a las propiedades y seleccionamos la pestaña hardware.
4- Para establecer la conexión con Mission Planner, primero debe activar la telemetria por bluetooth desde el transmisor XLRS utilizando los botones calientes.
Activar / Desactivar MAVLINK (BLUETOOTH) en transmisor XLRS:
Mantener pulsado botón (SL) SHIFT + Botón central (OFF) para activar.
Mantener pulsado botón (SL) SHIFT + Botón central (ON) para desactivar pero estará activada por USB.
Para verificar si se a activado el la telemetria Mavlink a través de Bluetooth, en algunas pantallas del transmisor XLRS (XPADx), se sustituirá el nombre “TEL” y aparecerá “Mvb” y en la pantalla principal aparecerá “USB->ACL” (Dependiendo de la versión de firmware del transmisor XLRS).
Si tiene activada la telemetria MAVLINK por Bluetooth desde el transmisor XLRS, el USB funcionará con los comandos ACL y tendrá acceso a la configuración desde sofware DMDStudio. (Si tiene la Telemetria activada a través de USB, no tendrá acceso a DMDStudio).
Nota: Para mas adelante, si quiere activar la telemetria por BLUETOOTH fija “Mvb” aceda al siguiente enlace: PUERTO USB O BLUETOOTH FIJO PARA MAVLINK / DATA LINK.
5- Conecte con el puerto COMx correspondiente y a 115200b.
6- En Mission Planner, haga click en el botón “CONNECT” y en pocos segundos empezará a enviar todos los parámetros, espere hasta que termine.
Notas:
La modulación RF para el transmisor y receptor XLRS es recomendable que este a 100Kb. (Por defecto ya esta activado desde fabrica). Puede revisar esta configuración en cada dispositivo en el DMDStudio en la pestaña DS/ RM / CONFIG.
Si sólo va a hacer pruebas ó no va a cambiar ningún parámetro posteriormente y solo desea volar con telemetria, puede cancelar la carga inicial. Para misiones largas es conveniente que se carguen los parámetros.
7- Una vez terminado este proceso tendrá el sistema XLRS enlazado con la telemetria Mavlink de la Pixhawk.
Recuerde: Debe tener el receptor XLRS y el autopiloto Pixhawk encendidos.
TRANSMISOR BTSD1 TELEMETRIA A TRAVÉS DE USB CON MISSION PLANNER
1- Conecte el USB al transmisor BTSD1 y al PC.

2- Active la telemetria Mavlink en BTSD1:
Mavlink Activado: La telemetria Mavlink se activa automáticamente cuando el transmisor BTSD1 recibe algún paquete Mavlink o si recibe algún paquete desde el puerto “MODEM” del receptor XLRS.
Si tiene enlace con el receptor XLRS y la conexión con pixhawk es correcta desde el display del transmisor BTSD1 se mostrará “MAV” (Telemetria Mavlink activada). Si no muestra “MAV” no tendrá comunicación con Mission Planner u otros softwares similares.

Mavlink Desactivado: Si el transmisor BTSD1 no recibe ningún paquete Mavlink o desde el puerto “MODEM” del receptor entonces automáticamente entrará en modo ACL para tener acceso a la comunicación con el sofware DMDStudio.

Para desactivar la comunicación Mavlink desde RX a BTSD1 puede:
Desconectar el puerto COM de Mission Planner.
Desconectar el cable del puerto “MODEM” del receptor XLRS del puerto de telemetria del autopiloto ó apagar el receptor XLRS.
3- Verifique el puerto COMx del transmisor (Puede verlo desde el Panel de control\Hardware y sonido\Dispositivos e impresoras)
4- Abra el software Mission Planner.

5- Conecte con el puerto COMx correspondiente y a 115200b.
6- En Mission Planner, haga click en el botón “CONNECT” y en pocos segundos empezará a enviar todos los parámetros, espere hasta que termine.
Notas:
La modulación RF para el transmisor y receptor XLRS es recomendable que este a 100Kb. (Por defecto ya esta activado desde fabrica). Puede revisar esta configuración en cada dispositivo en el DMDStudio en la pestaña DS/ RM / CONFIG.
Si sólo va a hacer pruebas ó no va a cambiar ningún parámetro posteriormente y solo desea volar con telemetria, puede cancelar la carga inicial. Para misiones largas es conveniente que se carguen los parámetros.
7- Una vez terminado este proceso tendrá el sistema XLRS D1 enlazado con la telemetria Mavlink de la Pixhawk.
Recuerde: Debe tener el receptor XLRS y el autopiloto Pixhawk encendidos.
FAQ. No me funciona la comunicación del sistema XLRS con Mission Planner
¿Que pasos debo seguir?
1- Compruebe que RX XLRS y TX XLRS tienen enlace RF (Desde la pantalla 2 “COBERTURA RF” del TX XLRS puede comprobar el enlace de RC y Telemetria, debería tener entre -19 y -21dBm a 1 metro entre RX y TX aproximadamente).
- 1.1 No tengo enlace entre TX y RX, acceda al siguiente link: Enlazar (Link) dos dispositivos TX y RX.
2- Desde el receptor RXLRS, compruebe la conexión de los pines del puerto “MODEM” de RX XLRS con el puerto de Telemetria 1 de su autopiloto, aquí puede ver mas información:
- Diagrama de conexionado sistema Airborne (RXLRS + XOSD3B + Cube)
- Diagrama de conexionado Sistema Airborne (RXLRS + XOSD + Pixhawk).
{kind=link}
3- Desde el XOSD, compruebe la conexión de los pines del puerto “CH4/MAV” de XOSD con el puerto de Telemetria 2 de su autopiloto.
4- Compruebe la configuración del puerto de telemetria 1 y 2 del autopiloto, parámetro SERIAL 1 y SERIAL 2 debe configurarlo a “38” = 38400 baudios.
5- Compruebe que tiene activada la telemetria Mavlink en su transmisor XLRS por USB (Mvu) o por Bluetooth (Mvb):
- 5.1- Activar Telemetria USB: Mantén pulsado (SL + ON) desde la pantalla 2 “COBERTURA RF” verá como las letras TEL han cambiado a Mvu (Mavlink a través de USB).
- 5.2- Activar Telemetria BLUE: Mantén pulsado (SL + OFF) desde la pantalla 2 “COBERTURA RF” verá como las letras TEL han cambiado a Mvb (Mavlink a través de Bluetooth).
6- Ahora si todo esta bien, habrá Mission Planner revise el puerto COM correcto de TX XLRS y seleccione 115200 baudios.
Nota: Si aún no le funciona conecte el receptor RXLRS a DMDStudio/DEV/PORTS y compruebe que el puerto de la fila 5 “MODEM” esta configurado por defecto a 38400,8,N.